
SEARCH FOR YOUR PRODUCT
OLI is the international leader in industrial vibration technology, providing clients around the world with industrial vibrators, electric vibrators, concrete consolidation, frequency converters and a vast range of products designed to adapt to multiple applications in the widest range of industrial sectors.
The company combines the quality of Italian know-how with a global strategy, allowing it to become one of the main sector players in the international field thanks to the contribution of an international network of business subsidiaries spanning all five continents.









MOTOVIBRATOR FINDER

FLOW AIDS CALCULATOR

MOTOVIBRATOR FINDER
OLIVIBRA CALCULATOR
NEWS AND EVENTS
Pioneering Efficiency and Sustainability in the Recycling Industry
10 minutes with Alessandro Vespignani – OLI Far East

Why Is Durability Key in Choosing Mining Equipment?
OLI=TOP PERFORMANCE. Design engineers across the region consistently choose OLI Vibrators for their projects, recognising the brand’s unwavering reliability and unparalleled performance.
NEWS AND EVENTS
Pioneering Efficiency and Sustainability in the Recycling Industry
10 minutes with Alessandro Vespignani – OLI Far East
Why Is Durability Key in Choosing Mining Equipment?
OLI=TOP PERFORMANCE. Design engineers across the region consistently choose OLI Vibrators for their projects, recognising the brand’s unwavering reliability and unparalleled performance.
Clients are always our priority
Great attention by the entire OLI Group team is given to establishing relations based on growth and mutual benefit with clients, which are always the focus and inspiration behind the business model and corporate development. Meeting clients’ needs is a priority, building a partnership based on trust is the end objective.
OLI can combine high levels of performance with consolidated reliability, adapting to market changes thanks to a range of excellent products for use in numerous applications. With ever-increasing innovation, OLI is a state-of-the-art company, constantly projecting towards the future.
Offering excellent customer service is a major priority for OLI: for this reason, the company guarantees order processing within 24 hours, giving clients around the world rapid access to the same level of quality in terms of product and service.
Concrete consolidation, pneumatic vibrators, electric vibrators: high quality product ranges
Thanks to high skills and know-how in the vibration sector gained through decades of experience, OLI is the reference point capable of understanding and analysing the needs of every single client, providing a customised solution for every single request.
All the products in the OLI range were designed to meet market demands and can be used in numerous fields of application thanks to a team of engineers specialising in the design of efficient, reliable and safe solutions.
OLI’s principle focus is on electric vibrating motors, which are designed and manufactured by the “Industrial Vibrators” division.
The “Flow Aids” division offers products such as pneumatic vibrators, hammer blasters, single impact pneumatic hammers, air cannons, aerator pads and nozzles.
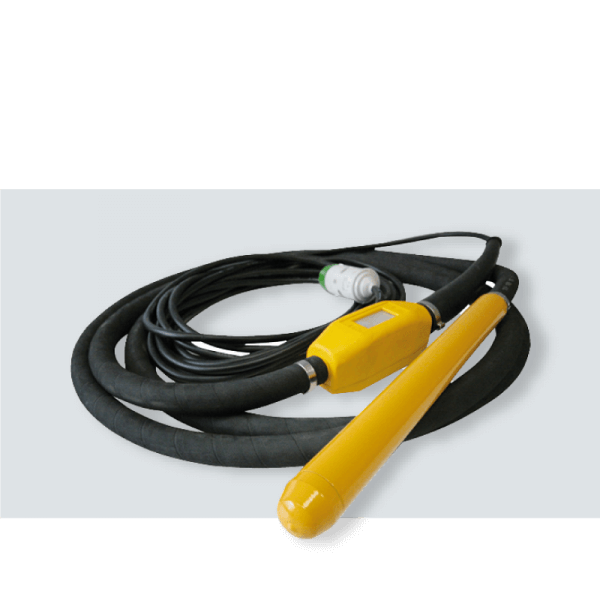
The “Concrete Consolidation” division includes a range of building products, such as vibrating concrete pokers, converters and high frequency external vibrating motors.
OLI’s objective is to provide a top-quality service to its clients, through constant commitment by achieving excellence in every process phase and in pre-sales and after-sales support.